3df zephyr pro允许你自动从照片中重建3D模型。该过程是完全自动的,不需要编码目标、手动编辑或特殊设备。软件是建立在我们专有的,尖端的,重建技术之上。它有一个用户友好的界面,并有可能在许多常见的3D格式导出,甚至产生无损视频,而不需要外部工具。此外,可以生成真实正射影像、数字高程模型(DTM),甚至计算面积、体积、角度和等高线,是从现实建模的完美工具。本站提供
3df zephyr pro破解版下载
破解教程
1、运行安装程序开始软件安装向导并且完成软件安装
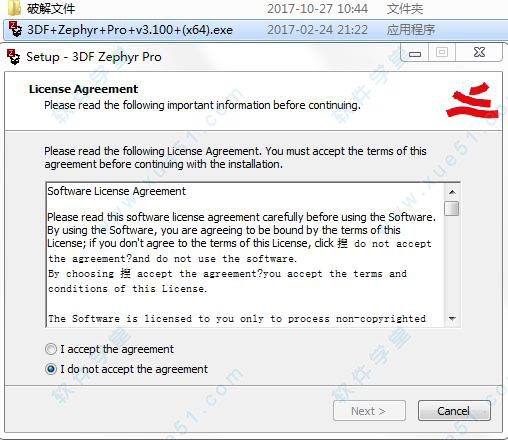
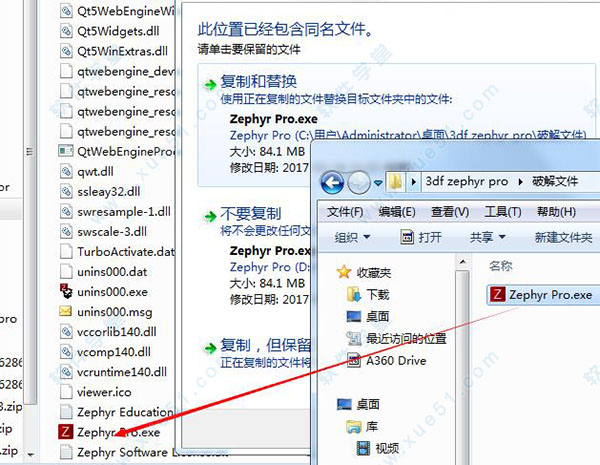
2、安装好之后不要启动软件,将破解补丁复制到安装路径下并且替换同名文件即可破解
功能特色
3DF Zephyr Pro功能介绍
1、多ICP注册 - 自动和容易地注册您的点云扫描内的Zephyr与多ICP注册算法。您可以直接在Zephyr和v3.0内部对激光扫描点云进行彩色化,使得此过程更加容易,并允许您在已经生成摄影测量点云的情况下制作任何点云结构;完成后,您还可以使用任何其他工具那些结构化点云,如网格生成,轮廓线生成,以及3DF Zephyr Free可以提供的一切。
2、手动和自动折线提取(仅限空中) - 快速,轻松地生成绘图元素(并以.dxf格式导出),无论是手动绘制图片还是让Zephyr为您完成工作。
3、激光扫描格式支持与全局束调整扫描对齐 – 从Faro的.fls和.fws文件格式开始,您将能够直接在3DF Zephyr Pro (所有版本)中查看这些本机格式,甚至导入它们作为非结构化对象在您的工作区Pro和航拍
4、从运动管道(所有版本)更快的全局结构,运动重建引擎的结构已更新,提供更快速精确的稀疏点云重建。
5、网格photoconsistent优化,提取更多的细节重建网格时
软件特色
1.3DF Zephyr是一个对计算机要求很苛刻的应用
因为它需要所有可用的CPU内核的优势,它利用了NVIDIA CUDA技术,如果有的话。
请注意:启用CUDA显卡可以显着提高性能。
2.3DF Zephyr配备了一个友好的用户界面
并有能力出口的许多常见的3D格式,甚至产生高清晰度视频,而无需外部工具的需要。 3DF和风是建模与现实的完美工具,3DF西风是建立在我们专有的,尖端的,重建的技术之上。
3.3DF Zephyr是建立在3DF萨曼莎和3DF STASIA的顶部
我们领先的,可追溯的,学术上的认可,在企业内部建立技术。 我们非常自豪我们的产品背后的技术,因为它是多年的研究和开发的结果。产品背后的研究已经导致对顶级计算机视觉大会的许多学术刊物。我们的技术是完全透明的和可追踪的,它被认为是在我们的重建引擎的最有效和innovative.Every像素数中的一个。我们的技术使用每一个图像像素的,得到最准确的溶液成为可能。为了做到这一点,我们使用一个高效外的核心机制进行计算。
使用教程
要创建一个新项目,只需点击工作流>新项目(1)。项目向导(3)屏幕将出现,这将指导您通过导入图片的过程。
对于标准工作流程,只需点击下一个按钮,然后在软件中添加照片即可。
但是,在该向导中有两个子菜单称为导入(3)和附加选项(4)。
在导入菜单中有两个选项:
进口控制点的限制:3DF ZePHR不需要任何预校准文件;不管怎样,如果你有自己的设备创建的校准文件,你可以通过选择这个选项来加载校准文件。点击下一个按钮,你会发现另一个子菜单,你可以选择:
-手动输入每个内部和外部参数(对于每个图像);
-指定位置和欧拉角;
-使用文本文件导入内部和外部参数;
输入相机位置限制:作为前一个选项,这个选项允许您在3DF ZePHR中输入相机位置(通过加载TXT文件)并使用它们来约束3D重建;该条目的实际使用的标准示例由无人机或UA拍摄的图片表示。V系统记录记录GPS坐标的射入EXIF数据。
在附加选项子菜单(4)中,您可以指定软件来执行四个三维重建阶段中的每一个,而不在一个阶段和另一个阶段之间停止;当您没有足够的时间来详细设置3D重建时,该工具会非常有用。这种技术被称为批处理,并且只推荐给高级用户,因为它代表了3DF ZePHR中自动化的最高水平。
在附加选项(4)中,在线计算预先计算的相机校准选项允许将相机校准参数保存在3DF ZePHR在线数据库上,以便软件能够自动获得提供精确校准参数和减少结构时序的信息。从运动阶段开始,当摄像机再次被利用时。
在前一个子菜单中,如果这些图片以前是用3DF伪装工具生成的,则还可以加载与照片相关的掩码。点击下一步,将出现掩蔽页面(见上面的图像),它将指定掩码是否已正确加载到3DF ZePHR(绿色OK应该靠近图片的名称,对于每个导入的掩码)或不。
通过选择方向选项中的忽略掩蔽,3DF ZePHR将仅在生成稠密点云时利用掩模;如果图像背景纹理良好,因此该工具是有用的,因此可以帮助相机的第一相位定向。
下一个窗口是照片选择页,其中用户被要求加载图片。可以将“n”拖动到窗口中,或者单击“添加”(5)来选择照片目录。从3DF版本3.1开始,ZePHR用户也被允许添加和处理原始文件,例如:
NEF
-CR2
-ARW2
-ORF
3DF ZePHR允许你从视频图像按钮(6)中导入图像和视频,这个工具可以在最后被视为照片的帧中分割视频。
在加载窗口中,可以选择所需的文件,然后指定将保存所提取的帧集合的目标文件夹。在下面的选项中,可以设置要提取的帧速率(FPS)、每个帧上的模糊分析和相似帧的识别阈值和拒绝。
若要开始提取,只需单击提取框并在工作区中导入(7)。
在加载图像或视频文件并点击Next按钮后,您将看到摄像机校准页面,在那里您可以看到每个进口图像的列表以及3DF ZePHR将用于每个相机及其ExIF数据的校准。
通过鼠标右键点击,你可以选择或取消选择所有图像,并克隆校准。
从这个页面,您可以添加一个新的校准(8),或修改校准(9),3DF ZePHR已经自动识别了照片的EXIF数据。
在“修改校准”页中,可以选择要更改的焦点长度(如果加载的图片已被使用不同焦距),然后定义校准参数。
通过从文件按钮导入参数,您可以加载已经用外部应用程序创建的校准文件(见Labyx 3DF)。
提示:如果你有用广角或鱼眼镜头拍摄的进口图片,建议激活调整切向失真参数选项(10)。
一旦完成了校准步骤,就必须通过摄像机定向设置页面设置3D重建的第一阶段,这将生成稀疏PO。






0条评论